Hardware

Solftware
Turns on an LED on for one second, then off for one second, repeatedly.
This example code is in the public domain.
*/
// Pin 13 has an LED connected on most Arduino boards.
// give it a name:
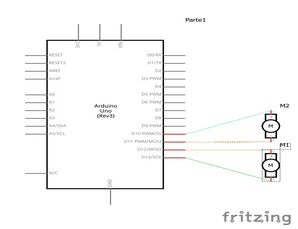
int InA = 12; //Blanco Motor Derecho
int InB = 11;//Amarillo Motor Derecho
int InC = 10; //Rojo Motor Izquierda
int InD = 9; //Azul Motor Izquierda
// the setup routine runs once when you press reset:
void setup() {
// initialize the digital pin as an output.
pinMode (InA,OUTPUT);
pinMode (InB,OUTPUT);
pinMode (InC,OUTPUT);
pinMode (InD,OUTPUT);
}
// the loop routine runs over and over again forever:
void loop() {
delante();
delay(500);
detras();
delay(500);
derecha();
delay(500);
izquierda();
delay(500);
quieto();
delay(500);
}
void delante(){
digitalWrite (InA, HIGH);
digitalWrite (InB, LOW);
digitalWrite (InC, LOW);
digitalWrite (InD, HIGH);
}
void detras(){
digitalWrite (InA, LOW);
digitalWrite (InB, HIGH);
digitalWrite (InC, HIGH);
digitalWrite (InD, LOW);
}
void derecha(){
digitalWrite (InA, HIGH);
digitalWrite (InB, LOW);
digitalWrite (InC, HIGH);
digitalWrite (InD, LOW);
}
void izquierda(){
digitalWrite (InA, LOW);
digitalWrite (InB, HIGH);
digitalWrite (InC, LOW);
digitalWrite (InD, HIGH);
}
void quieto(){
digitalWrite (InA, LOW);
digitalWrite (InB, LOW);
digitalWrite (InC, LOW);
digitalWrite (InD, LOW);


















